

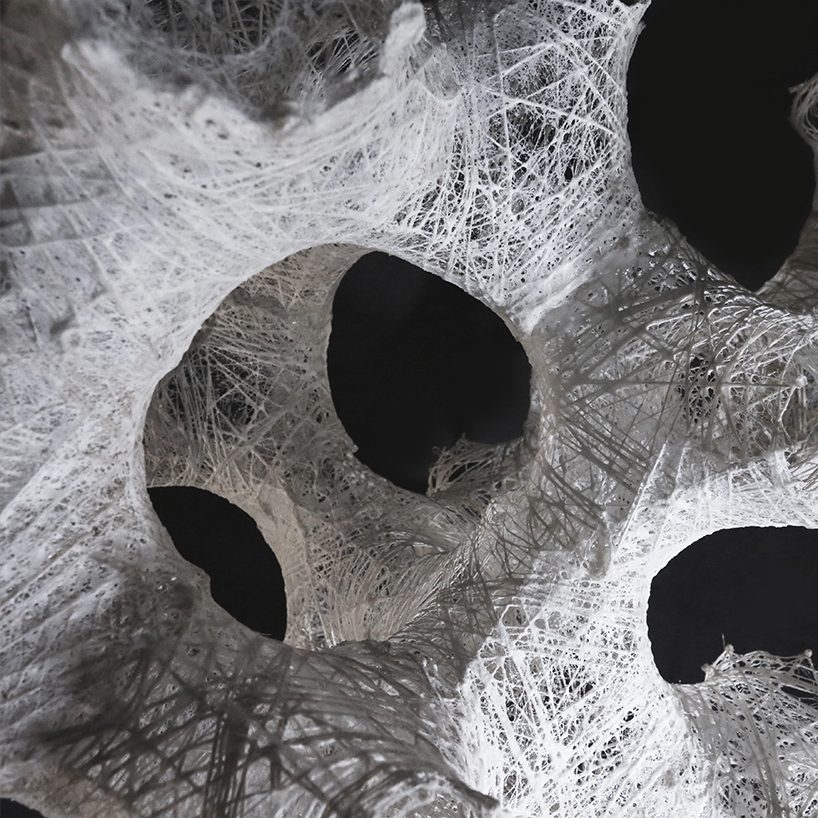
This research project looks at lightweight discrete assemblies with a focus on weaving strategies to produce digital objects(i) as serial units with a range of weave densities. Discreteness in the design of part to part relationships aim to embed all intelligence needed for describing potential assemblies into individual parts.These investigations are inspired by the recent works in material science and particle physics where the details of the individual types of units determine the range of materials and elements, such as in the work of Neil Gershenfeld on the development of digital materials.(ii)





As opposed to mass-customized parts, digital objects have the potential to decrease fabrication cost, while increasing production and complexity. Digital objects for discrete assemblies have the self-correcting joint logic as seen in the works of Casey Rehm, Gilles Retsin, Jose Sanchez, Manuel Jimenez Garcia, and Neil Gershenfeld. This logic is an open-ended construction principle, such as in Lego, that guide the assembly process, resulting in a non-holistic catalog of discrete assemblies.
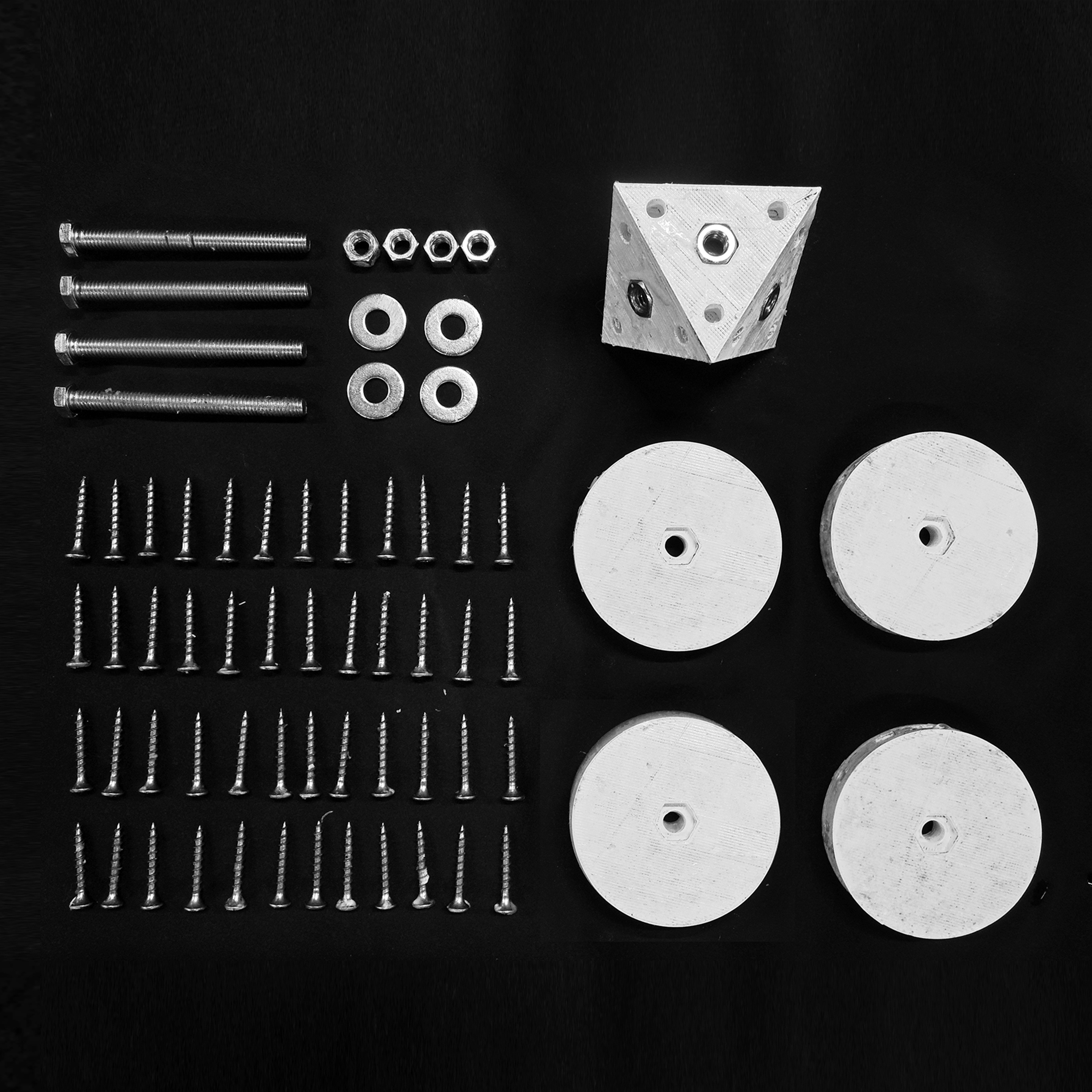
Upon the strategic study of part to part relationships, Robo-Loom’s units are designed serially, and fabricated using a single mandrel. Based on a tetrahedra, the mandrel has four faces, each containing twelve nodes to guide internal and external assembly of the fabrication process. Three of these nodes are designed to guide the units to aggregate with a rotational freedom of 120 degrees. All other nodes are designed to guide the weaving process.
Instead of fabricating a custom mandrel per part to achieve variant densities, this process relies on the use of a single mandrel and achieves variation based on different combinations of weaving patterns. The mandrel is designed to attach a Stäubli robot arm for automating the weaving process of the digital objects. This ongoing research aims to increase complexity in design by removing manual labor and codifying intentions. All parts of the mandrel can be dismantled for reuse after woven threads are treated with a resin compound.
Featured in Archinect
